






0 引言
多模态模型由单模态模型发展而来,多模态融合技术(multimodal fusion technology,MFT)可以充分利用不同模态数据之间的互补性,通过融合故障特征得到更好的特征表示,以达到提高诊断效果的目的[10]。文献[11]分别采用带自适应噪声的完全集成经验模态分解和快速傅里叶变换提取时域和频域故障特征,通过选取其最优特征子集实现了数据级的多模态故障特征融合;文献[12,13]结合了多模态融合技术与卷积神经网络(convolutional neural networks, CNN),分别提取滚动轴承的故障数据的时域、频域2个模态特征并融合,建立了MF-CNN诊断模型;文献[14]直接以振动、电信号为输入,分别经过独立的堆叠自编码器(stacked auto-encoder, SAE)进行特征提取与信号重构,借助SAE的隐藏层输出实现特征融合。然而,现有多模态融合诊断模型普遍计算成本高、复杂度大,导致特征学习困难。因此,多模态诊断模型需要减少计算成本,同时还要兼顾不同模态之间的融合交互,提高诊断准确率。
为此,提出了基于多模态时频图融合的风电机组齿轮箱故障诊断方法。将原始振动信号和小波包分解子信号转换为时频图像,把复杂的故障特征信息转化为数据量较少的图像纹理特征,减少输入数据量;采用图像特征融合的方法建立诊断模型,将故障诊断问题转换为图像分类问题,实现不同模态信息的充分、高效利用。
1 小波包时频图特征
WPD利用低通滤波器h、高通滤波器g将整个信号的频带进行树状分解,从而得到几个不同的子频带。对于给定的基本尺度函数φ(t)和基本小波函数ψ(t),需要满足双尺度方程:
设u0=φ(t)、u1=ψ(t)双尺度方程可改写为
式中un(t)是φ(t)的正交小波包,小波包函数可以通过二进制缩放移位得到:
式中:j是比例因子,k是移动因子,n是频率系数。原始信号y(t)的小波包分解可表示为
式中i=1,2…,2j。通过不同级别的小波包带通滤波器对原始振动信号进行滤波,得到各子带信号;
小波包3层分解如图1所示。子带信号的能量特征可以有效反映齿轮箱在不同频带内的运行状态。设子带信号
图1
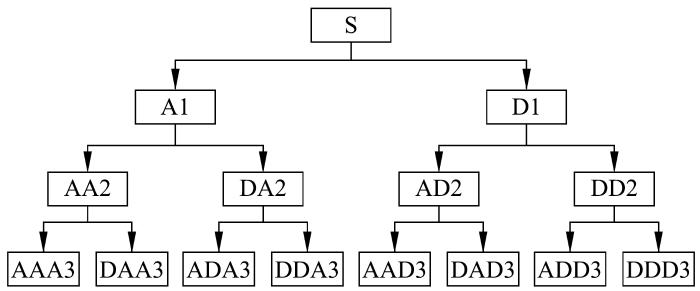
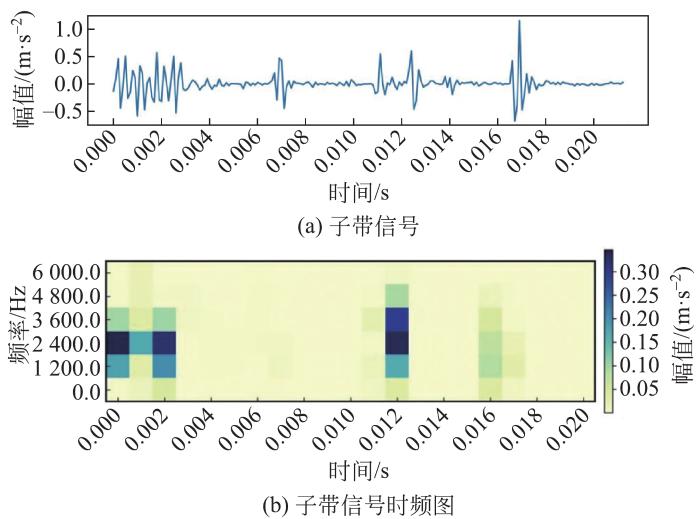
子带信号
图2
2 多模态融合CNN-ViT模型
CNN网络结构由于其平移不变性和局部相关性而擅长提取图像的局部特征,但其感受野有限,很难捕获全局信息[20]。Transformer网络结构可以捕获长距离依赖关系,多头自注意力模块可以捕获长距离的特征依赖,但会忽略局部特征的细节。为此提出了多模态融合的CNN-ViT神经网络结构,最大程度保留不同模态数据的全局和局部特征。
2.1 CNN模块
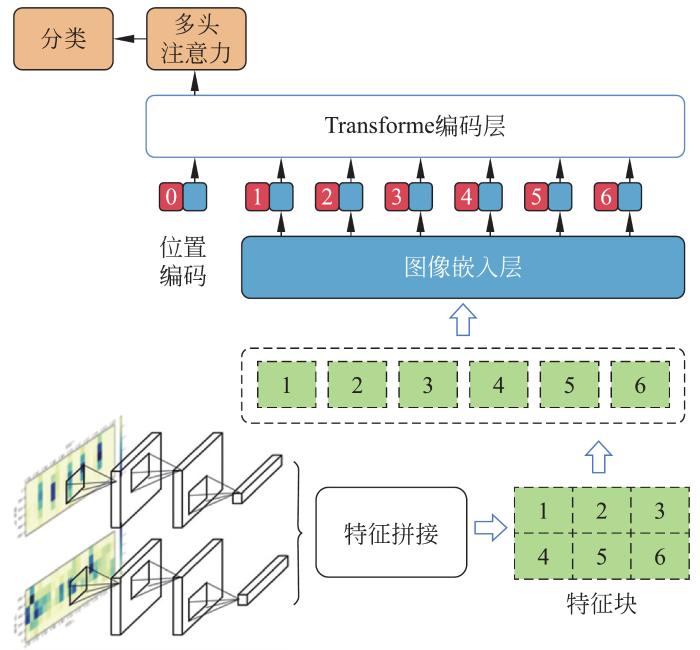
对于每个模态的时频图特征,分别输入至CNN网络结构中,输入图像的大小由时频图滑窗和重叠数据共同决定,隐层由3层Conv2d层、3层Pooling层和Flatten层组成。
2.2 多模态融合
多模态融合方法根据融合方式可分为数据级融合、特征级融合与决策级融合3种[21]。当模态信息针对同一内容而又不互相包含时,特征级融合能最大限度地保留原始信息,在理论上能达到最佳的诊断效果,因此选择特征级融合方式融合时频图像的纹理特征。各模态时频图像的纹理特征用Xi、Yi表示,用Concatenate层进行特征级融合,即
式中:Xi及Yi表示2个模态第i通道上的高阶特征,Ki、Ki+c表示第i个通道特征图对应的卷积核,Zconcatenate为m×n的特征块。
2.3 ViT模块
Transformer Encoder层则同时接受N个D维的特征向量及各特征块z的位置信息Epos,公式可表示为:
式中:
将多个头的输出进行拼接得到多头的输出:
式中Contact(·)是拼接操作。所提多模态融合CNN-ViT网络模型结构如图3所示。
图3
3 故障诊断流程
基于多模态时频图融合的风电机组齿轮箱故障诊断方法流程如下:
(1)采集振动信号。利用振动加速度传感器采集风电机组齿轮箱的故障信号。
(2)确定多模态输入数据。选择合适的参数对采集的信号进行小波包分解,利用小波包能量特征分析方法选择互补的多模态输入数据,多模态输入数据应内含齿轮箱负载大小、故障类型、损伤程度等方面的信息。
(3)时频图特征构造。分别构造多模态输入信号的时频图像,并划分训练样本集和测试样本集。
(4)构建多模态融合CNN-ViT诊断模型。用构建的时频图样本集进行训练,得到多模态融合CNN-ViT故障诊断模型。
(5)故障识别。将构建的测试样本集输入故障诊断模型中,实现风电机组齿轮箱未知故障的识别。
4 试验案例
4.1 数据来源
试验案例使用美国凯斯-西储大学电气工程实验室的齿轮箱轴承试验台数据集。试验台由电机、扭矩传感器/编码器、测功机和控制电子设备组成。测试轴承型号为SKF6205,以12 kHz采样频率采集了0HP—3HP这4种不同负载状态下的齿轮箱输入端轴承振动数据。数据包含滚动轴承正常状态、内圈故障、外圈故障和滚动体故障共4种不同类型,故障直径为7×0.025 4、14×0.025 4、21×0.025 4 mm。试验案例将数据集按照6∶1的比例设置训练和测试数据集,数据集共计2 880个样本。
4.2 小波包能量特征分析
对所取振动数据进行小波包分解和能量特征分析。相同故障深度(7×0.025 4 mm)、小波基函数(db4小波)、分解层数(3层)的条件下,各故障类型的第0子带能量占比均最高,重点分析1—7子带的能量特征,对比结果如图4所示。正常状态下1—7子带能量占比呈现递减趋势;轴承内圈故障下能量集中在1—5子带上;轴承滚动体故障下能量主要集中在3、4子带上;轴承外圈故障下各子带能量整体较高,能量主要分布在3、4子带上。因此,使用db4小波进行3层小波包分解后,可以根据各子带的能量特征有效区分不同故障类型。
图4
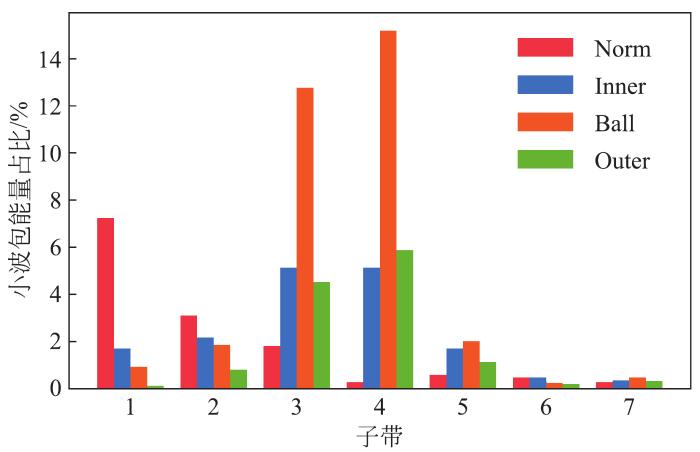
图4
小波包分解各子带能量(不同故障类型)
Fig.4
Wavelet packet decomposes the energy of each subband (Different fault types)
相同故障类型(轴承外圈故障)、相同故障深度(21×0.025 4 mm)、不同负载条件下的小波包子带能量对比图如图5所示,可以看出变负载下的小波包能量特征没有明显规律,无法实现变负载的故障特征提取。
图5
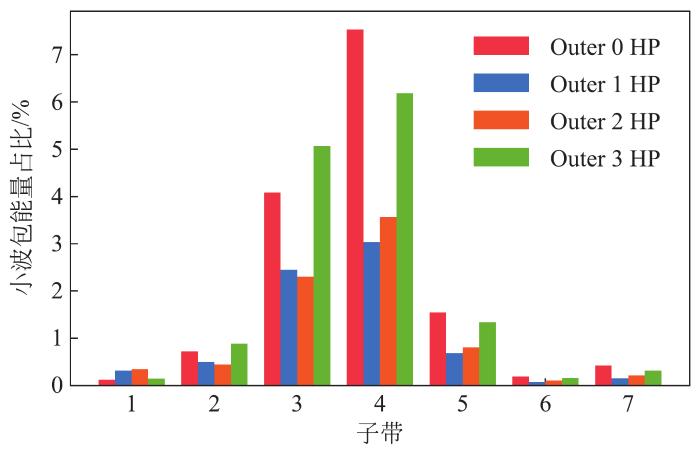
图5
小波包分解各子带能量(不同负载)
Fig.5
Wavelet packet decomposition of sub-band energy (different load)
4.3 模型验证
引入混淆矩阵来评估多模态融合CNN-ViT故障诊断模型的准确率。首先,记录验证集下,诊断模型预测正确和预测错误的样本个数。将正常状态和故障状态分别命名为阳性类和阴性类。
在计算过程中使用了以下标签:NTP(true positive)表示正确识别为正常状态的病例数;NFP(false positive)是指被错误识别为正常状态的病例数;NTN(true negative)是指正确识别为故障状态的案例数;NFN(false negative)是指错误地识别为故障状态的情况的数量。利用标签设置精确率(precision)λp、召回率(recall) λr、准确率(accuracy) λa、F1分数(F1 Score) λF1这4个评价指标。各评价指标的计算公式如下:
表1 各模型评价指标统计
Table 1
| 模型 | λp/% | λr/% | λa/% | λF1 |
| SVM | 77.45 | 77.71 | 73.25 | 0.7757 |
| XGBoost | 84.63 | 83.75 | 81.50 | 0.8419 |
| CNN | 87.47 | 89.38 | 87.25 | 0.8841 |
| WDCNN | 94.18 | 94.17 | 93.00 | 0.9417 |
| 多模态CNN | 96.95 | 97.29 | 96.75 | 0.9712 |
| 多模态CNN-ViT | 99.79 | 99.79 | 99.75 | 0.9979 |
图6
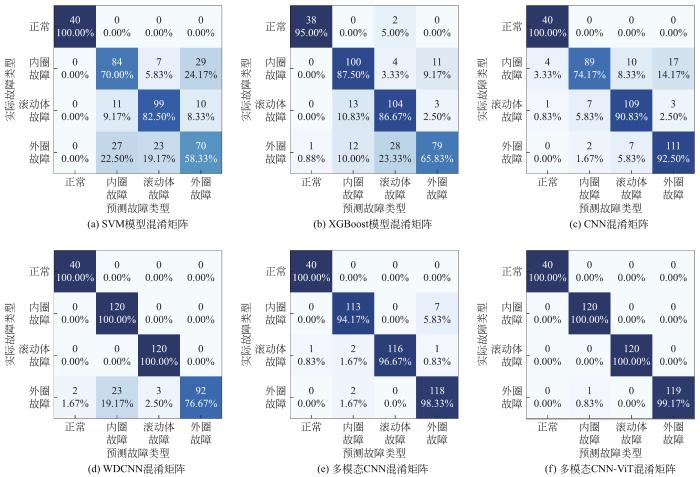
对比图6(a)、6(b)、6(c)、6(d)混淆矩阵可以看出单模态条件下,深度学习模型CNN和WDCNN的诊断效果整体上优于浅层机器学习模型SVM和XGBoost。根据图6(c)、6(d),单模态CNN模型和WDCNN模型在3类故障的诊断上均存在误报现象,CNN模型内圈故障、滚动体故障和外圈故障的准确率分别为74.17%、90.83%、92.50%,而WDCNN有宽核提取特征,小核特征表示的优势,能够准确诊断内圈故障、滚动体故障,但是外圈故障诊断准确率较低为76.67%,单模态模型在变负载条件下的诊断仍有一定局限性。根据图6(c)、6(d),多模态CNN模型对比单模态CNN模型,误判情况有所改善,3种故障诊断准确率分别为94.17%、96.67%、98.33%,同比均有提升。图6(f)多模态CNN-ViT模型的诊断准确率为99%,诊断结果均优于其他单、多模态模型。表1展示了上述模型的评价指标统计,多模态CNN-ViT模型各指标均优于其他模型。
相同模型结构下多模态CNN-ViT模型的平均计算速度为16 ms/样本,而多模态CNN模型为37 ms/样本,振动信号转图像的方法可以减少数据量使得计算速度加快。
5 结论
针对变负载条件下多模态融合故障诊断模型的特征学习困难问题提出一种图像融合的诊断方法。该方法利用多模态融合技术提高诊断准确率,时频图融合方法将故障诊断问题转换为图像分类问题,降低计算成本。通过齿轮箱试验台测得的正常、内圈故障、外圈故障和滚动体故障4种类型信号数据对该方法进行验证,得到以下结论:
(1)小波域和时频域多模态融合,实现了变负载下的故障特征提取。多模态融合方法能够提高模型诊断准确率,单模态CNN模型准确率为96.75%,而所提多模态CNN-ViT模型准确率为99%。
(2)时频图方法把复杂的故障特征信息转化为数据量较少的图像纹理特征,通过减少输入数据量降低了计算成本和计算复杂度。
参考文献
大功率并网风电机组状态监测与故障诊断研究综述
[J].
Research review on condition monitoring and fault diagnosis of high power grid-connected wind turbines
[J].
基于支持向量机的风电机组变桨系统故障诊断
[J].
Fault diagnosis of wind turbine pitch system based on support vector machine
[J].
Use of SCADA data for failure detection in wind turbines
[C]//
风电装备故障诊断与健康监测研究综述
[J].
Review of fault diagnosis and monitoring for wind power equipment
[J].
风力发电机振动监测与故障诊断方法综述
[J].
Review of vibration monitoring and fault diagnosis methods of wind turbines
[J].
Multi-component fault classification of a wind turbine gearbox using integrated condition monitoring and hybrid ensemble method approach
[J].
A deep capsule neural network with data augmentation generative adversarial networks for single and simultaneous fault diagnosis of wind turbine gearbox
[J].
基于改进生成对抗网络的风机行星齿轮箱故障诊断方法
[J].
Fault diagnosis method of wind turbine planetary gearbox based on improved generative adversarial network
[J].
A hybrid attention improved ResNet based fault diagnosis method of wind turbines gearbox
[J].
Multiview enhanced fault diagnosis for wind turbine gearbox bearings with fusion of vibration and current signals
[J].
A wind turbine bearing fault diagnosis method based on fused depth features in time-frequency domain
[J].
多模态学习方法在滚动轴承故障诊断中的应用
[J].
Application of multimodal deep learning methods in rolling bearing fault diagnosis
[J].
基于新型卷积神经网络的非侵入式负载监测方法
[J].
Non-invasive load monitoring method based on novel convolutional neural network
[J].
基于多模态堆叠自动编码器的感应电机故障诊断
[J].
Induction motor fault diagnosis based on multimodal stacked auto-encoder
[J].
基于小波变换的改进混合蛙跳-差分进化-神经网络预测模型的短期风速预测
[J].
Improved hybrid frog-hopping-differential evolutionary-neural network prediction model based on wavelet transform for short-term wind speed prediction
[J].
风力发电机组滚动轴承故障振动诊断方法综述
[J].
Overview of fault vibration diagnosis methods for rolling bearing of wind turbine units
[J].
碳中和背景下多通道特征组合超短期风电功率预测
[J].
A multi-channel feature combination model for ultra-short-term wind power prediction under carbon neutral background
[J].
自适应提升及预测误差修正的风电功率超短期预测
[J].
Ultra-short-term wind power prediction based on adaptive lifting and prediction error correction
[J].
应用时频图像纹理特征的行星齿轮故障诊断
[J].
Fault diagnosis of planetary gear used time-frequency image texture features
[J].
A comprehensive review on convolutional neural network in machine fault diagnosis
[J].
多模态数据融合综述
[J].
Survey of multimodal data fusion
[J].
基于小波包能量特征的滚动轴承故障监测方法
[J].
The method of roller bearing fault monitoring based on wavelet packet energy feature
[J].



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}