






0 引言
VSG具备SG的功角特性,在新能源出力波动和负荷投切等工况下可能出现逆变器输出频率与功率振荡。虚拟惯量与阻尼系数是影响振荡的主要参数,不合理的参数设置将进一步加剧振荡,严重时将损坏逆变器[7]。有学者利用VSG参数灵活可变的特性提出了以频率变化曲线分区间切换虚拟惯量的棒-棒算法,降低了频率响应超调[8]。该算法使虚拟惯量在2个固定值间阶跃,易破化系统稳定性;但无法跟踪频率变化,调节效果一般。文献[9,10,11,12]提出了一系列结合频率偏差及变化率构造函数曲线的方法,实现了调整值对偏差量的追踪功能。其中文献[11]采用根轨迹法对比3种函数形式中控制参数的变化灵敏度,探讨这些参数摄动对动态过程的影响,证明了指数形式对频率稳定性的改善效果更优,然而未给出控制参数选取范围。这类基于函数形式的算法灵活多变,却缺乏系统性选择且函数涉及的控制参数增加了设计复杂度。文献[13]利用智能算法的强化学习能力在线调整核心参数以解决参数与角频率间的非线性问题。文献[14]加入阻尼系数控制,同时优化2个参数使神经网络在学习中加速了参数调节过程。这类方式通用性强,但实际运行计算量大且目标函数设计困难。
基于模糊控制的自适应算法依据专家经验确定模糊规则从而实时调整参数,无须考虑复杂的函数形式及参数设计,且计算量小,鲁棒性较好[15,16,17,18]。文献[16]结合参数调整原则设计了双参数的模糊规则表,兼顾了动态调节的快速与稳定性。文献[17]在控制回路中添加储能荷电状态(state of charge,SOC)的负反馈环节,探讨了SOC对虚拟惯量的约束,为模糊论域设置提供了依据,却因增加系统特征方程阶数,提高了分析难度。文献[18]进一步细化频率变化区间,并增加模糊规则,提升了参数调整灵活度,却未考虑其余工况下的应用。然而模糊控制精度与模糊规则有关,在系统偏差较小时可用规则较少,导致控制精度下降。
综上,本文借鉴变论域思想,通过二级模糊控制器生成伸缩因子的方式实现模糊论域的动态变化,使模糊规则等效增加,进一步提升控制精度与通用性。最后,通过在Matlab/Simulink中与几种VSG自适应控制策略进行仿真对比,验证该策略的有效性。
1 VSG控制策略
1.1 VSG控制结构
VSG技术通过模拟SG惯量与阻尼特性,实现一次调频、调压功能以解决电力电子设备无法提供等效阻尼与惯量的问题[7]。其拓扑如图1所示,主电路由分布式发电单元与储能并联后经逆变桥、LC滤波电路与负载或电网相连。VSG控制部分由有功-频率环、无功-电压环与定子电压方程3部分组成,该算法将计算功率转化为电压参考向量后送入电压电流双闭环控制,生成正弦脉宽调制(sinusoidal pulse width modulation,SPWM)波来控制开关管的通断。图1中:Udc为直流电压; Lf、Cf为滤波电感、电容;Ls为网侧电感;ea、eb、ec及iLabc分别为桥臂电压、电流;uoabc、ioabc为逆变器输出电压、电流。
图1
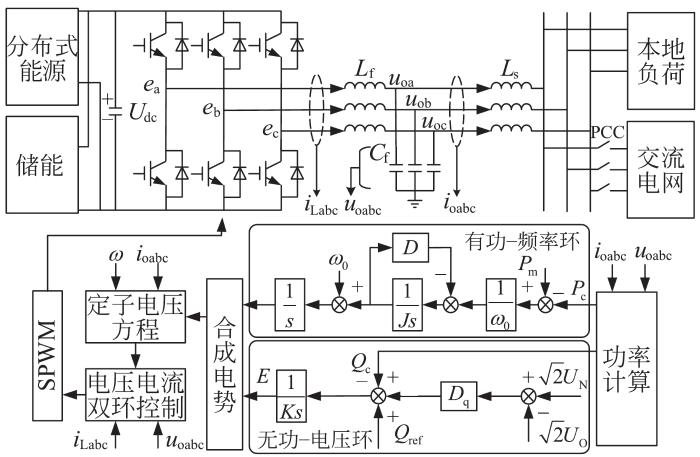
VSG在有功-频率环内引入SG 2阶转子运动方程以模拟转动惯量及实现一次调频特性。假设SG极对数为1,则方程如下:
式中:J为虚拟惯量;D为阻尼系数;ω与ω0分别为运行角频率与额定角频率;ωg为电网角频率;Pm与Pe为机械功率和输出有功功率;θ与θ0为VSG输出相角和额定相角;δ为功角。
无功-电压环控制实现输出电压稳定及一次调压功能,方程如下:
式中:E为虚拟电动势;K为积分系数;Kq为无功电压下垂系数;UN和U分别为机端电压参考值与实际电压;Qref和Qe分别为无功功率参考值和实际输出无功功率。
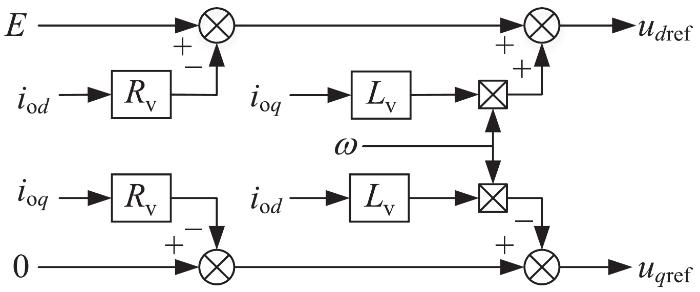
考虑到SG定子绕组存在阻抗,本文也引入基于dq坐标系的如下定子电压方程以模拟定子阻抗上的压降,从而获取机端参考电压:
式中:udref与uqref分别为机端电压d轴与q轴参考值;iod与ioq为输出电流d轴与q轴分量;Rv为虚拟电阻;Lv为虚拟电感。该方程控制框图如图2所示。
图2
因式(
1.2 J、D对系统性能的影响
运行中将VSG逆变器等效成理想电压源,可得接入电网的等效模型,如图3所示。图中:RΣ和XΣ为线路等效电阻与电抗。
图3
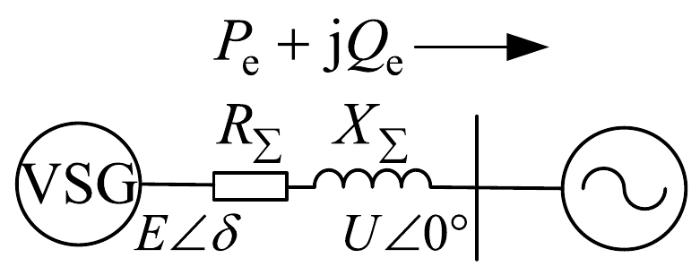
运行过程中功角δ通常较小,可认为sin δ≈δ,则VSG电磁功率方程为
对VSG稳态工作点线性化以建立有功-频率环小信号模型,则有
式中:δ0为稳态工作点功角;Δω(s)、Δωg(s)、Δδ(s)、ΔPm(s)、ΔPe(s)分别为稳态工作点附近的角频率、电网频率、功角、机械功率和输出有功功率的小扰动量。该模型如图4所示。
图4
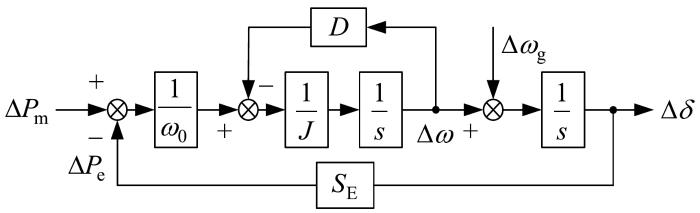
以系统功率不平衡工况为例,此时参考功率-频率及输出功率-参考功率的传递函数分别为
由自动控制原理可知,式(
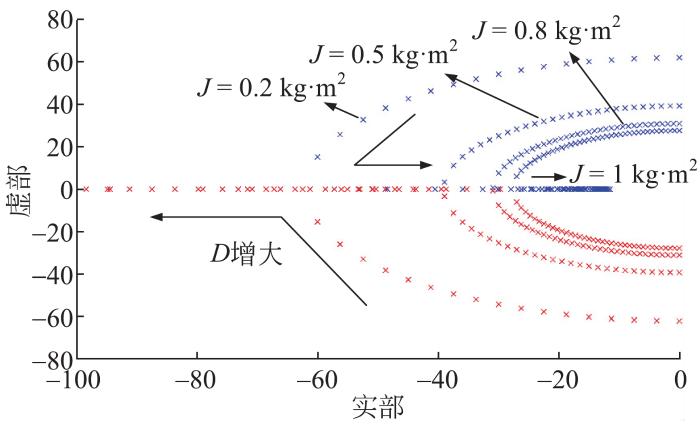
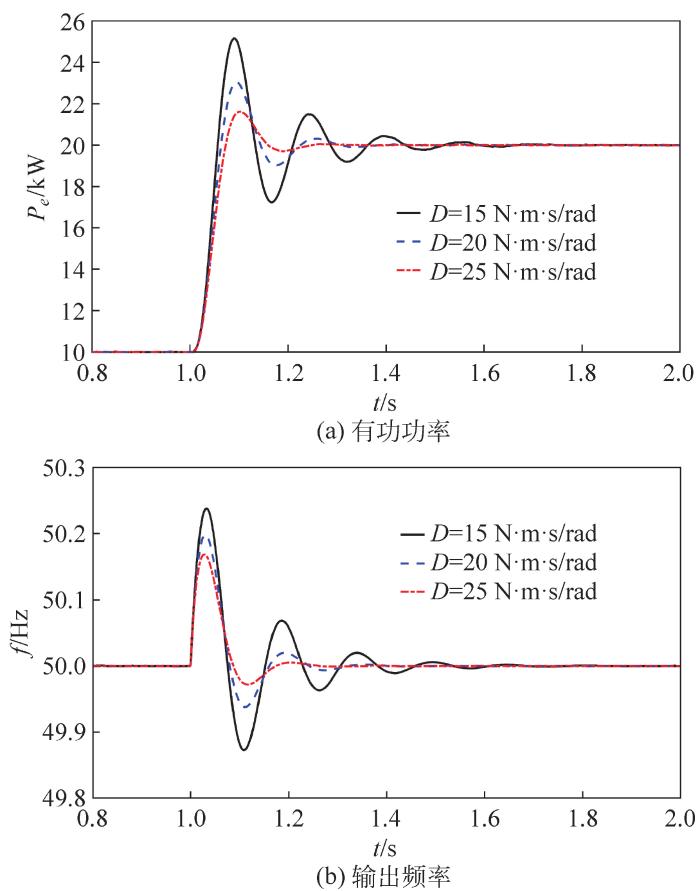
不同J和D对系统的影响可采用图5所示的根轨迹图进行大致分析:随着D的增加,极点逐渐远离虚轴,系统稳定性增加,并在负实轴处相交并分离,系统工作状态由欠阻尼转为过阻尼,动态性能变差。J增加,极点向虚轴靠近,故过大的J值不利于系统稳定与动态恢复。
图5
实际系统通常工作在欠阻尼状态。根据式(
总结式(
表1 参数对性能指标的影响
Table 1
| 参数变化 | 性能指标的变化 | |||||
| tpω | tsω | σpω | tpp | tsp | σpp | |
| J增大 | 增大 | 增大 | 减小 | 增大 | 增大 | 增大 |
| D增大 | 减小 | 减小 | 减小 | 增大 | 减小 | 减小 |
1.3 J、D的选取范围
不考虑储能出力限制,根据GB/T 33593—2017《分布式电源并网技术要求》[20],逆变器仅能连续运行于频率变化为±0.5 Hz的区间内,此时逆变器调频所需有功功率应为其额定容量的40%~100%,则有
式中:ΔTmax为机械与电磁转矩的最大差值;ΔPmax、Δωmax分别为逆变器输出的逆变器最大有功功率偏差及最大角频率偏差。本文选取的额定容量为30 kV·A,则D取值范围为[12.16,30.4]。综合考虑超调量和调节时间,设置阻尼比区间为[0.7,1],则有
可得J取值范围为[0.03,0.58]。
2 VSG模糊自适应控制策略
2.1 VSG自适应原理
本文将扰动过程分成4个区间来确定J、D的调整原则,如图6所示。
图6
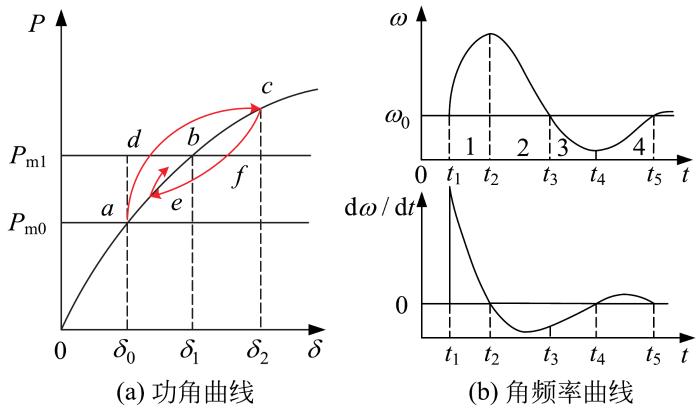
扰动发生后,VSG由稳态工作点a点向c点移动,经振荡后稳定在稳态点b。由于阻尼的作用,实际运行点按a-d-c-f-e移动。在a-d段(区间1)内Pe≤Pm1,由式(
表2 J、D的调整原则
Table 2
| 区间序号 | Δω | dω/dt | J调整 | D调整 |
| 1 | >0 | >0 | 增大 | 增大 |
| 2 | >0 | <0 | 减小 | 微增 |
| 3 | <0 | <0 | 增大 | 增大 |
| 4 | <0 | >0 | 减小 | 微增 |
2.2 模糊自适应控制结构
模糊控制能便捷地将J、D调整原则转化为模糊规则,实现J、D的实时调整,其结构如图7所示。
图7
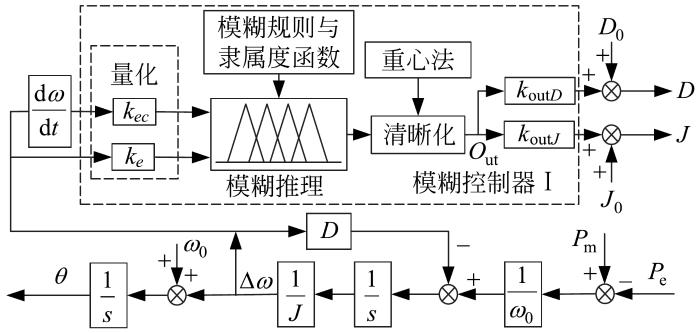
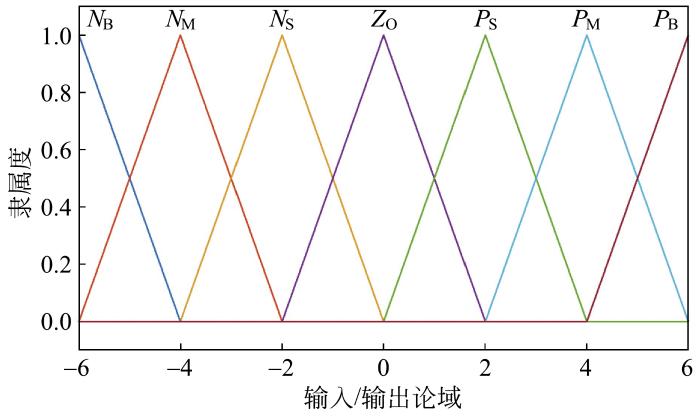
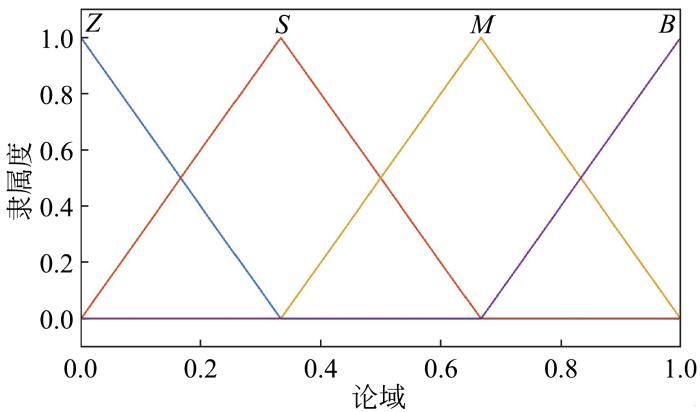
以Δω与dω/dt为模糊输入e和ec,经量化因子ke与kec放缩后使输入论域为[-6,6],得到推理模块输入,完成模糊化。ke与kec应根据输入基本论域设置如下:
式中dωmax为最大角频率变化率。
表3 ΔJ的模糊规则
Table 3
| ec | ΔJ的模糊规则 | ||||||
| e=NB | e=NM | e=NS | e=ZO | e=PS | e=PM | e=PB | |
| NB | PB | PB | PB | PS | NM | NB | NB |
| NM | PB | PB | PM | ZO | NS | NM | NB |
| NS | PB | PM | PS | ZO | NS | NS | NM |
| ZO | PS | ZO | ZO | ZO | ZO | ZO | PS |
| PS | NM | NS | NS | ZO | PS | PM | PB |
| PM | NB | NM | NS | ZO | PM | PB | PB |
| PB | NB | NB | NM | PS | PB | PB | PB |
表4 ΔD的模糊规则
Table 4
| ec | ΔD的模糊规则 | ||||||
| e=NB | e=NM | e=NS | e=ZO | e=PS | e=PM | e=PB | |
| NB | PB | PB | PB | PM | PM | PM | PB |
| NM | PB | PB | PM | PS | PS | PM | PM |
| NS | PB | PM | PS | ZO | PS | PS | PM |
| ZO | PS | PS | ZO | ZO | ZO | PS | PM |
| PS | PM | PS | PS | ZO | PS | PM | PB |
| PM | PM | PM | PS | PS | PM | PB | PB |
| PB | PB | PM | PM | PM | PB | PB | PB |
图8
模糊推理模块采用mamdani型算法;解模糊模块则采用重心法得到输出,输出论域为[-6,6]。推理输出经比例因子koutJ与koutD伸缩后得转动惯量调整值ΔJ及阻尼系数调整值ΔD。koutJ与koutD按最大调整值ΔJmax、ΔDmax设置如下:
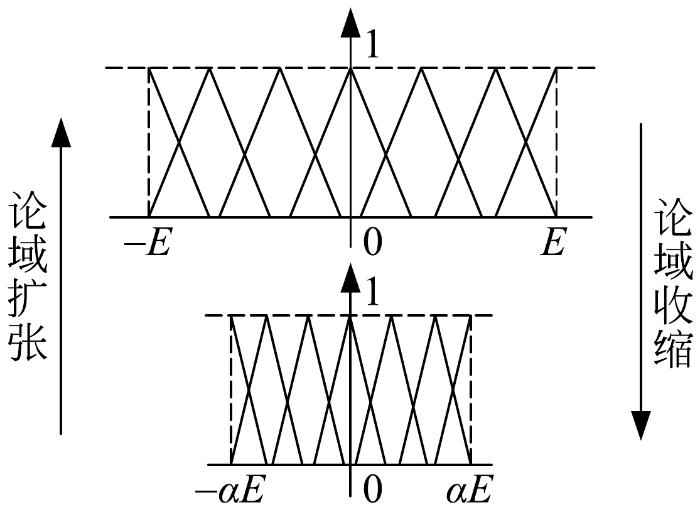
3 变论域模糊自适应控制
模糊控制差值机制说明模糊控制精度与模糊规则数量相关,规则越多则控制越精细[21]。由于扰动的不确定性,Δω与dω/dt无法每次都达最大值,当扰动较小时,被变化范围限制的e与ec在固定论域上符合的隶属度函数较少,造成动态过程中可用规则较少,控制精度下降。若强行增加模糊规则数量,则又增加了设计复杂性。
图9
3.1 改进结构
李洪兴教授提出以误差变量确定的函数型伸缩因子,其常用形式如下:
式中:x为模糊输入e或ec;τ>0;k∈(0,1);ε为无穷小的正数[21]。
式中EC为ec论域的大小。确定伸缩因子形式后,改变输入输出量的大小相当于改变论域[25],公式如下:
式中:Ine、Inec分别为经伸缩后的模糊推理输入;α1、α2为输入伸缩因子;Oout、OoutJD分别为解模糊化后的输出与经比例因子kout伸缩后的模糊输出。该方式的根据在于:若直接使论域伸缩,等同于各模糊子集隶属度函数同时改变,每进行1次模糊推理就需要逐点计算,则计算量过大。
图10

3.2 伸缩因子模糊控制器设计
论域变化经验如下:
(1)输入侧。当e与ec较大或接近最大值时,应维持原始论域大小不变,则伸缩因子接近于1;反之,减小伸缩因子使模糊输入变大,保证其隶属度函数遍布大部分论域,增加可用规则。
(2)输出侧。当e与ec较大时应增大输出论域,以尽快消除误差;反之,说明系统已趋于稳定,此时应减小输出论域,避免振荡。
表5 α1、α2的模糊规则
Table 5
| ec | α1和α2的模糊规则 | ||||||
| e=NB | e=NM | e=NS | e=ZO | e=PS | e=PM | e=PB | |
| NB | B/B | B/B | B/M | M/S | B/M | B/B | B/B |
| NM | B/B | B/M | M/S | S/S | M/S | B/M | B/B |
| NS | B/M | M/S | S/S | Z/Z | S/S | M/S | B/M |
| ZO | M/S | M/S | Z/Z | Z/Z | Z/Z | M/S | M/S |
| PS | B/M | M/S | S/S | Z/Z | S/S | M/S | B/M |
| PM | B/B | B/M | M/S | S/S | M/S | B/M | B/B |
| PB | B/B | B/B | B/M | M/S | B/M | B/B | B/B |
表6 β的模糊规则
Table 6
| ec | β的模糊规则 | ||||||
| e=NB | e=NM | e=NS | e=ZO | e=PS | e=PM | e=PB | |
| NB | PB | PB | PB | PM | PM | PM | PB |
| NM | PB | PB | PM | PS | PS | PM | PM |
| NS | PB | PM | PS | ZO | PS | PS | PM |
| ZO | PM | PS | ZO | ZO | ZO | PS | PM |
| PS | PM | PS | PS | ZO | PS | PM | PB |
| PM | PM | PM | PS | PS | PM | PB | PB |
| PB | PB | PM | PM | PM | PB | PB | PB |
图11
4 仿真分析
表7 仿真参数
Table 7
| 参数 | 数值 | 参数 | 数值 |
| 直流电压/V | 800 | J0/(kg·m2) | 0.3 |
| 线电压/V | 380 | D0/(N·m·s·rad-1) | 18 |
| 滤波电容/μF | 30 | 量化因子ke | 2.1 |
| 滤波电感/mH | 1.5 | 量化因子kec | 0.07 |
| 网侧电感/mH | 2 | 比例因子koutJ | 0.044 |
| 额定频率/Hz | 50 | 比例因子koutD | 2 |
4.1 J、D对动态性能的影响试验
图12
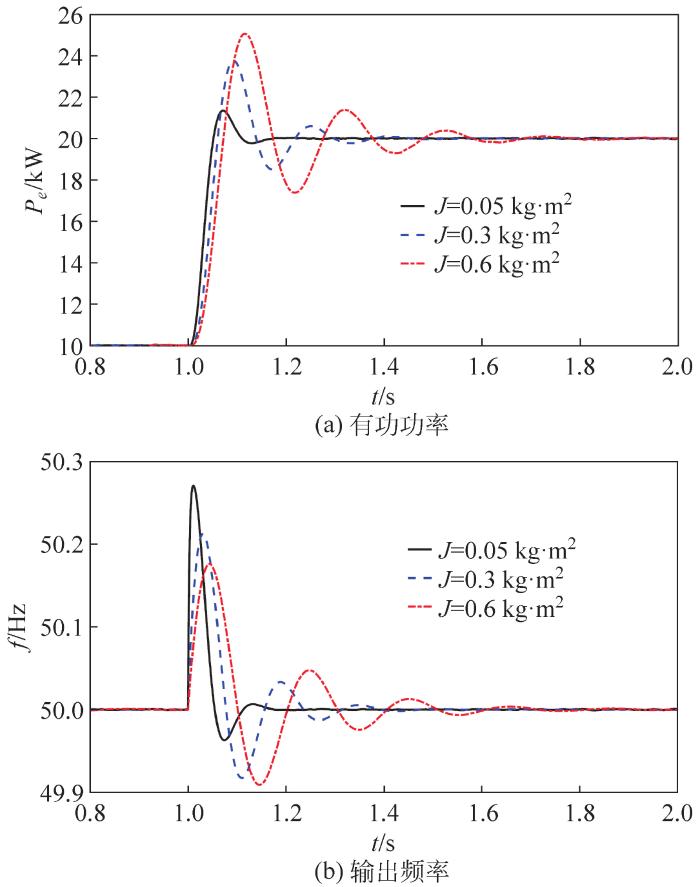
图12
D=18 N·m·s/rad时的有功功率与频率
Fig.12
Active power and frequency when D=18 N·m·s/rad
图13
4.2 不同控制策略的对比
为验证本文控制策略的优越性,本文对以下4种控制策略采用同样的初始参数设置,在多种工况下进行仿真对比。以与参考功率的最大偏差量ΔPmax及与输出频率设定值的最大偏差量Δωmax作为振荡幅度的分析指标,以稳定时间tm作为扰动后振荡结束的分析指标,上述指标值越小,策略抑制振荡能力越强。
(1)固定参数。
(2)线性策略[9]:惯量调节系数kJ=0.022,阻尼调节系数kD=3.85。
(4)本文策略:模糊规则表同模糊策略。
表8 工况1的分析指标
Table 8
| t/s | 控制策略 | ΔPmax/kW | Δfmax/Hz | tm/s |
| 0.7 | 线性 | 2.02 | 0.172 | 0.417 |
| 模糊 | 1.73 | 0.178 | 0.412 | |
| 本文 | 0.56 | 0.162 | 0.327 | |
| 1.3 | 线性 | 1.58 | 0.126 | 0.406 |
| 模糊 | 1.48 | 0.135 | 0.402 | |
| 本文 | 0.47 | 0.118 | 0.316 | |
| 2.0 | 线性 | 2.45 | 0.225 | 0.439 |
| 模糊 | 1.86 | 0.231 | 0.444 | |
| 本文 | 0.60 | 0.217 | 0.344 |
图14
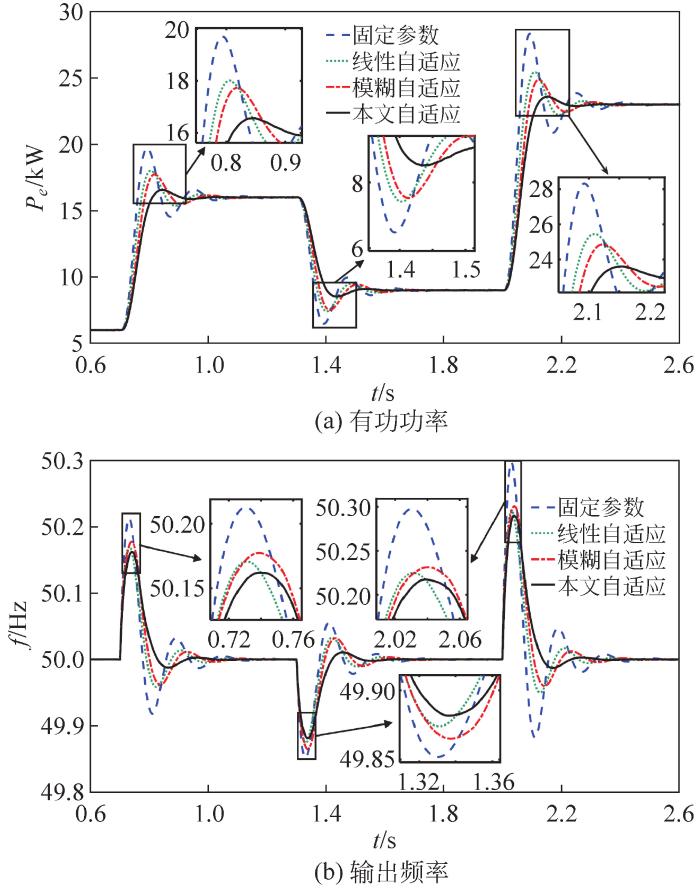
图14
负载变化时不同控制策略下的有功功率与频率响应波形
Fig.14
Active power and frequency response waveforms when the load changes under different strategies
以2 s扰动为例,由表8计算可知:3种控制策略功率超调量σP分别为10.6%、8.1%、2.6%,频率超调量σω分别为0.45%、0.46%、0.43%。线性与模糊策略都能抑制振荡,其中模糊策略在减小功率超调方面要优于线性策略,在减小频率超调方面却相反,但后续波形恢复时表现要好于线性策略。本文控制策略振荡次数最少,在稳定时间方面,本文策略比另外2种控制策略要少0.1 s左右。
表9 工况2的分析指标
Table 9
| t/s | 控制策略 | ΔPmax/kW | Δfmax/Hz | tm/s |
| 1.0 | 线性 | 3.18 | 0.054 | 0.428 |
| 模糊 | 2.61 | 0.046 | 0.432 | |
| 本文 | 2.35 | 0.036 | 0.353 | |
| 1.8 | 线性 | 1.63 | 0.035 | 0.377 |
| 模糊 | 1.54 | 0.034 | 0.381 | |
| 本文 | 0.54 | 0.012 | 0.311 |
图15
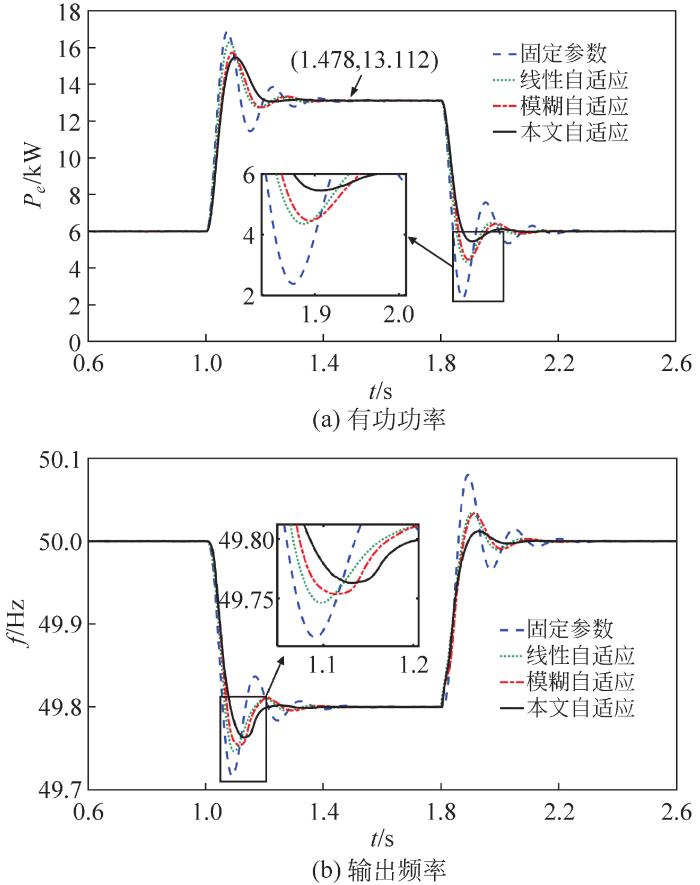
图15
电网频率变化时不同控制策略下的功率与频率响应波形
Fig.15
Active power and frequency response waveforms when the frequency of network changes under different control strategies
以工况1为例,不同控制策略J与D变化情况如图16所示。
图16
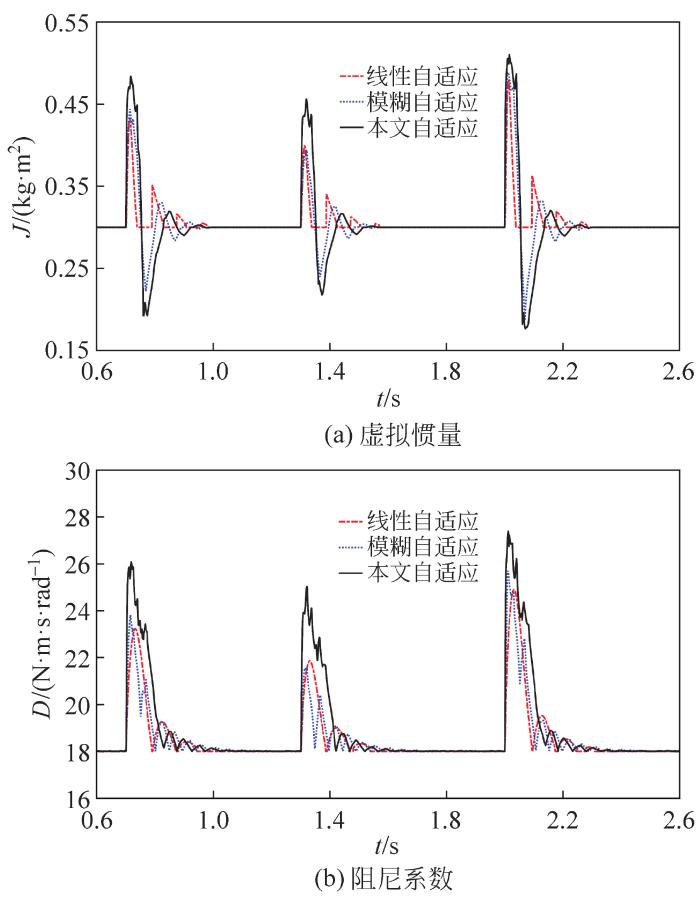
图16
不同控制策略下J与D的变化波形对比
Fig.16
Comparison of J and D waveforms under different control strategies
由图16可知,本文策略的J曲线呈现出灵活的双向变化趋势,且不存在不同区间内惯量突变情况。因为模糊规则丰富,本文策略和模糊策略的参数调节较线性策略更为灵敏。此外,因伸缩因子改变了模糊输入与输出,本文策略的J与D曲线无论峰值还是均值都要大于另外2种策略;且扰动越小的情况下J与D增大的程度就越大,扰动越大的情况下J、D增大程度越接近于另外2种策略。说明本文策略无论在何种扰动下都能使J与D在合适的区间内变化,展现了本文策略能充分利用参数变化范围的优势。
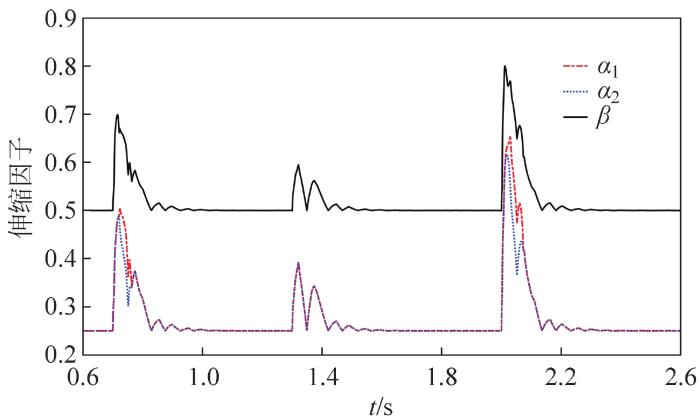
图17给出了伸缩因子的变化曲线,α1、α2与β值始终在规定区间变化,使自适应控制对误差的追踪更为灵敏,且在偏差值较大时保持较大的调节量,误差较小时使调节量缩小,不至于过大的J或D恶化系统响应过程。
图17
5 结论
本文探讨了VSG中参数J、D对系统动态过程的影响,通过二级模糊控制器生成伸缩因子实时改变模糊论域的方式对模糊自适应控制策略进行改进,同时在不同工况下与线性、模糊自适应控制策略进行了仿真对比。结果表明本文改进策略在面对较小误差时参数调节更为灵敏,能够充分利用J、D的选取范围。在抑制功率、频率振荡与加快动态恢复方面本文策略表现最优,能减少新能源出力与负荷波动带来的影响,对系统频率提供一定支撑,提升了电网对高比例新能源的接纳能力。此外,本文未进行实物验证,对于多机场合下策略的应用也需要进行深入研究。
参考文献
我国分布式能源发展现状及展望
[J].
Status and outlook of distributed energy development in China
[J].
光伏电源经新能源同步机并网的仿真研究
[J].
Simulation of photovoltaic power connected to grid by motor-generator pair
[J].
基于数据学习的新能源高渗透电网频率风险评估
[J].
Data learning-based frequency risk assessment in a high-penetrated renewable power system
[J].
考虑安全稳定约束的电网新能源承载能力分析
[J].
Analysis of new energy carrying capacity of power grid considering security and stability constraints
[J].
Synchronverters: Inverters that mimic synchronous generators
[J].
虚拟同步发电机及其在微电网中的应用
[J].
Virtual synchronous generator and its applications in micro-grid
[J].
高比例新能源电力系统的惯量控制技术与惯量需求评估综述
[J].
Review of inertia control technology and requirement evaluation in renewable-dominant power system
[J].
Power system stabilization using virtual synchronous generator with alternating moment of inertia
[J].
虚拟同步发电机转动惯量和阻尼系数协同自适应控制策略
[J].
Coordinated adaptive control strategy of rotational inertia and damping coefficient for virtual synchronous generator
[J].
基于自适应VSG的微网光储充放电控制技术
[J].
Microgrid optical storage charge and discharge control technology based on adaptive virtual synchronous generator
[J].
灵活虚拟同步机主要控制参数对系统频率稳定性的影响分析
[J].
Influence analysis of the main control parameters in FVSG on the frequency stability of the system
[J].
基于变下垂系数的直流配电网自适应虚拟惯性控制
[J].
Adaptive virtual inertia control of DC distribution network based on variable droop coefficient
[J].
基于改进型RBF神经网络的VSG转动惯量自适应控制
[J].
Adaptive inertia control for VSG based on improved RBF neural network
[J].
基于RBF的VSG转动惯量和阻尼系数自适应控制策略
[J].
RBF-based adaptive control strategy of rotational inertia and damping coefficient for VSG
[J].
Self-adaptive virtual inertia control-based fuzzy logic to improve frequency stability of microgrid with high renewable penetration
[J].
虚拟同步发电机参数自适应控制策略
[J].
Parameter adaptive control strategy of virtual synchronous generator
[J].
基于模糊控制的虚拟同步发电机参数自适应控制策略
[J].
Adaptive control strategy of virtual synchronous generator parameters based on fuzzy control
[J].
一种计及储能容量和SOC约束的模糊自适应VSG控制策略
[J].
Fuzzy adaptive VSG control strategy considering energy storage capacity and SOC constraint
[J].
基于虚拟阻抗的并联VSG改进控制策略研究
[J].
Research on improved control strategy of parallel VSG based on virtual impedance
[J].
分布式电源并网技术标准研究
[J].
Study on technical standard of distributed resources grid integration
[J].
Fuzzy控制的本质与一类高精度Fuzzy控制器的设计
[J].
The essence of fuzzy control and a kind of fine fuzzy controller
[J].
Enhanced variable universe fuzzy proportional-integral-derivative control of structural vibration with real-time adaptive contracting-expanding factors
[J].
变论域模糊PID控制在交流发电系统中的应用
[J].
Application of variable universe fuzzy PID control in AC power generation system
[J].
基于变论域模糊逻辑的互联电力系统负荷频率控制
[J].
Variable universe fuzzy logic-based load frequency control in an interconnected power system
[J].
基于Simulink变论域算法仿真技术研究
[J].
Research on simulation technology of variable universe algorithm based on simulink
[J].



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}